【Nano Energy】面向海洋物联网的自供能摩擦电传感器研究进展
背景介绍
- 近年来,在推动智能船舶发展、海洋产业升级的同时,加快海洋三维监测网络建设显得尤为关键。由于成本低廉、自动化程度高等优点,海洋传感器网络已广泛应用于水文信息采集、船舶状态监测、海洋环境监测、海上安全监测等领域。然而,现有海洋传感器网络的最大挑战是传统供电方式的需要额外供电,并且电池寿命有限,需要定期更换或充电,这不仅会导致维护不便,还会产生额外的费用消耗。此外,大多数电池系统都是用有毒化学物质制造的,这可能对海洋环境构成潜在风险。因此,此类海洋传感器网络迫切需要通用、可持续和环境友好的能源替代品。TENG可将不同类型的机械运动直接转换为高信噪比的电信号,感知海洋环境参数以及船舶系统和设备的工作状态参数,实现了现场运动感知信号的自供电传感,为智能海洋传感器网络提供了强有力的数据支撑。
文章概述
随着电子/材料和制造业的快速发展,海洋传感器在船舶和海洋工程领域取得了重大进展,迎合了海洋物联网(MIoT)和智能船舶的发展趋势。随着海洋传感器数量的增加和分布范围的扩大,开发连续、可持续和无处不在的电源对于海洋传感至关重要,但这是一个尚未解决的科学挑战。通过摩擦纳米发电机 (TENG) 进行的海洋自供电传感可能是应对这种紧急情况的一种有前景的方法。大连海事大学徐敏义教授和邹永久副教授团队对摩擦电传感器在海洋物联网方面的应用进展进行了综述,TENG可以有效地将周围环境的机械触发器转换为电信号。它具有高效的机械能到电能的转换、自我维持、材料可用性广泛、成本低廉和良好的可扩展性等优点。本文综述了海洋摩擦电传感器的工作原理及其在船舶与海洋工程领域的应用,主要分为触觉传感器、位移传感器、流量传感器、振动传感器和速度传感器五类,包括先进的结构设计、功能材料创新和海洋应用场景。最后,文章还强调了这些技术的学术挑战和未来前景,以及将其转化为商业应用时需要考虑的关键点。该综述以“Advances in Self-powered Triboelectric Sensor toward Marine IoT”为题近日发表在顶级期刊《Nano Energy》上。
图文导读
 图1. 自供能海洋摩擦电传感器的分类:摩擦电触觉传感器、摩擦电位移传感器、摩擦电流量传感器、摩擦电振动传感器、摩擦电速度传感器。
图1. 自供能海洋摩擦电传感器的分类:摩擦电触觉传感器、摩擦电位移传感器、摩擦电流量传感器、摩擦电振动传感器、摩擦电速度传感器。
 图2.下一代海洋物联网范式展望图。
图2.下一代海洋物联网范式展望图。
总结
- 本文综述了近年来摩擦电海洋传感器的研究进展,对位移传感器、流量传感器、速度传感器、振动传感器和触觉传感器等的先进结构设计、材料创新、应用效果和未来发展思考等方面进行了比较和讨论。构建了海洋智能传感器网络系统(MIoT)新范式。海洋摩擦电传感器的未来发展是学术界和工业界需要考虑的重点领域。在学术研究方面,这涉及设备结构、材料创新、灵敏度、可靠性、防水技术、数字孪生和人工智能。在商业化应用方面,这涉及到产品的标准化、制造以及产业链的打造。MIoT将在未来彻底改变航运业现有的工作模式,全面提升航运业的工作效率,为我们开启航运改革的新时代。
转载链接:
致敬《水下无人系统学报》2023年度审稿专家
岁序更替,华章日新,2023年,176位审稿专家与《学报》一路同行,在百忙之中参与审稿工作,不仅为各位作者提出公正客观、准确详实的审稿意见,更为每一期期刊的顺利出版做出了重要贡献。期刊的进步离不开审稿专家的辛勤付出,正是各位专家深厚的学术功底、严谨治学的专业态度、对期刊工作高度负责的奉献精神,保证了期刊学术质量的稳步提升。在此,《水下无人学报》编辑部谨向所有审稿专家致以诚挚的感谢和崇高的敬意!新的一年,祝您工作顺利、阖家幸福、万事如意!
热烈欢迎更多的专家学者加入我们的审稿队伍,与我们共同打造具有广泛学术影响力的期刊品牌!——《水下无人系统学报》编辑部
2023年度审稿专家名单(仅展示前20)
原文链接:
【Device】水下多模态感知人工鱼侧线,可感知分辨水流、声信号和电场
背景介绍
- 鱼类能够通过其外侧神经丘感知来自水生环境的不同信号。鉴于此,本文开发了一种具有多模态传感功能的人工鱼外侧神经丘(AFLN)系统。AFLN 的直径小于 6 毫米,展示了紧凑的三维架构,同时能够检测水下的水流、声学信号和电场。将 AFLN 系统集成到水下机器人中可增强自主导航、避障和紧急逃生功能,展示初级机器智能。这种紧凑、轻便的仿生多模态传感器在提高水下机器人的感知能力方面具有巨大的潜力。
成果简介
中国科学院北京纳米能源与系统研究所唐伟团队开发了一种能够实现多模态感知的人工鱼侧线系统,可以感知并分辨水流、声信号和电场。相关研究以“Bionic underwater multimodal sensor inspired by fish lateralis neuromasts”为题发表在Cell旗下新期刊《Device》上。纳米能源所博士生舒生和博士生王廷宇为共同第一作者,唐伟研究员为通讯作者。
图文导读
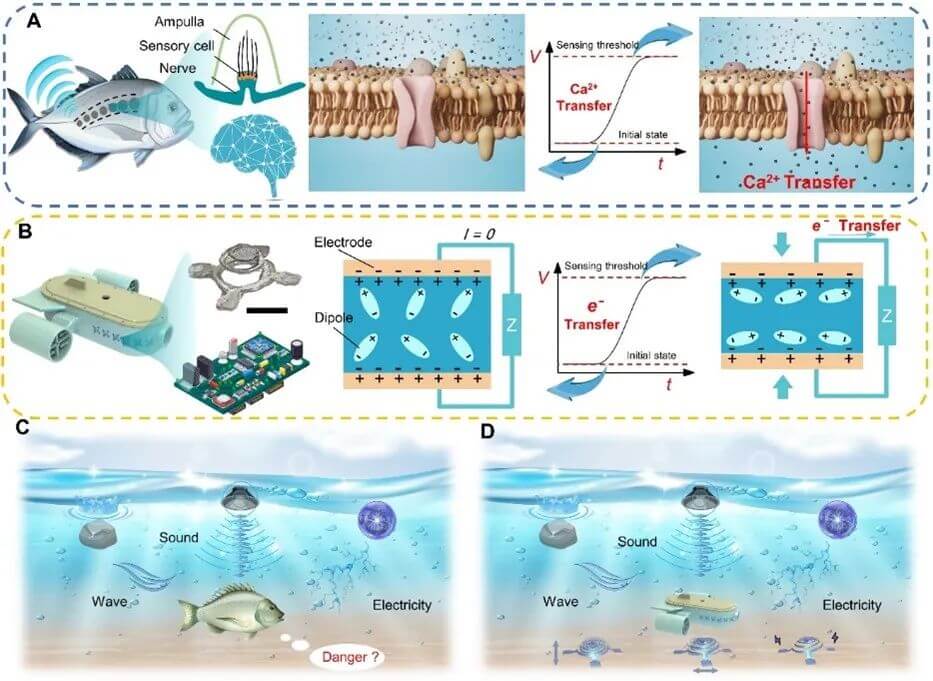 图1. 仿生结构及原理。(A)鱼类侧线系统的结构和传感方法。鱼类通过周围皮孔检测水流、声音和电等信号,触发神经细胞离子通道的开放和兴奋性递质的释放,从而产生感觉反应。(B) AFLN系统结构和传感方法。插图展示了其在水下机器人技术中的潜在应用。比例尺:2 毫米。(C) 鱼类可以借助侧线系统感知微弱的水流变化、声信号和水下电场。(D) 水下机器人还可以借助AFLN系统的不同响应来识别水波、水声和水下电场。
图1. 仿生结构及原理。(A)鱼类侧线系统的结构和传感方法。鱼类通过周围皮孔检测水流、声音和电等信号,触发神经细胞离子通道的开放和兴奋性递质的释放,从而产生感觉反应。(B) AFLN系统结构和传感方法。插图展示了其在水下机器人技术中的潜在应用。比例尺:2 毫米。(C) 鱼类可以借助侧线系统感知微弱的水流变化、声信号和水下电场。(D) 水下机器人还可以借助AFLN系统的不同响应来识别水波、水声和水下电场。
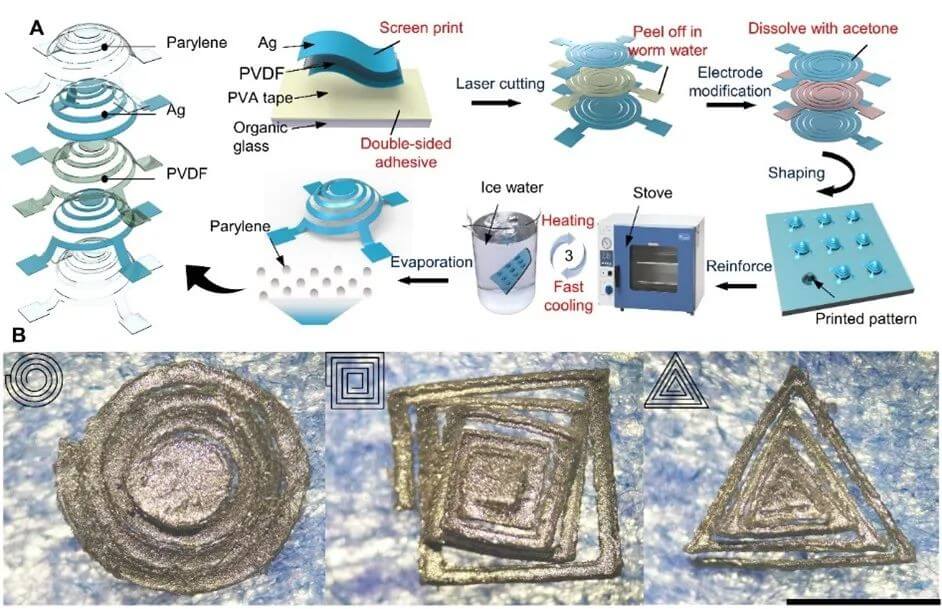 图 2. AFLN 的制造过程。(A) AFLN 的准备流程图。(B) 激光切割后不同图案的比较。光滑的圆形形状更加稳定。比例尺:2 毫米。
图 2. AFLN 的制造过程。(A) AFLN 的准备流程图。(B) 激光切割后不同图案的比较。光滑的圆形形状更加稳定。比例尺:2 毫米。
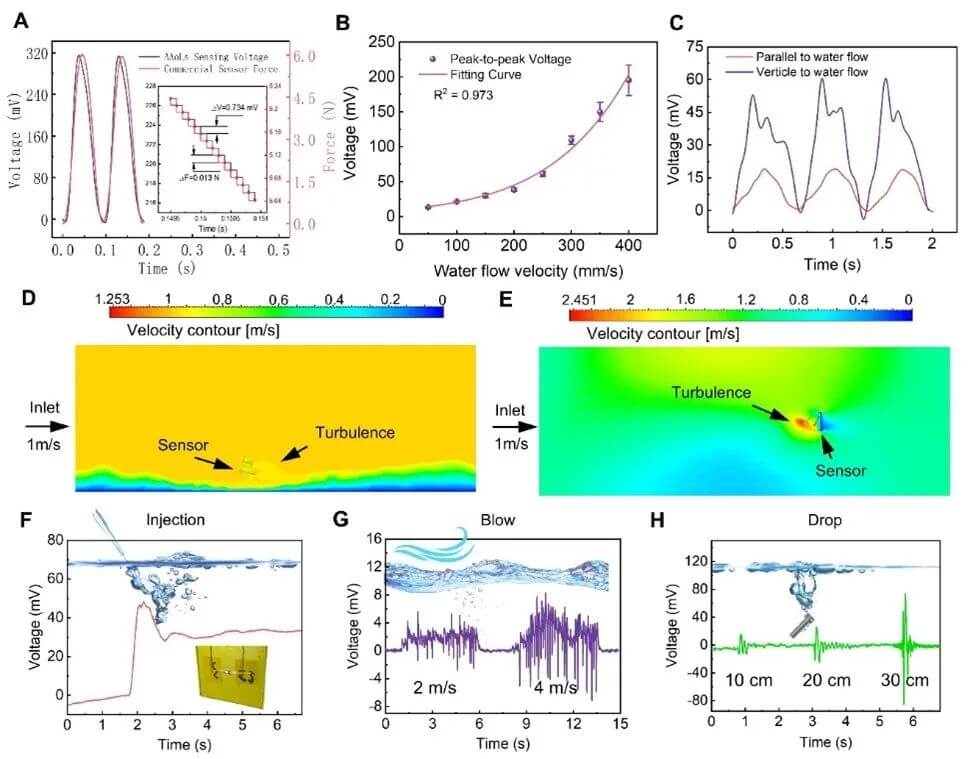 图 3.AFLN 对水压的响应。(A) AFLN 与力传感器串联情况下的力和输出电压比较。(B) 不同水流速度下的输出电压。(C) 不同方向水流下输出电压的比较。(D) 传感器与流场平行时的计算流体动力学 (CFD) 模拟。(E) 传感器垂直于流场时的 CFD 模拟。(F-H) AFLN 对不同弱机械刺激的反应。用橡胶头滴管在附近注入水(F),用吹风机吹水面(G),将小螺丝从不同高度扔入水中(H)。
图 3.AFLN 对水压的响应。(A) AFLN 与力传感器串联情况下的力和输出电压比较。(B) 不同水流速度下的输出电压。(C) 不同方向水流下输出电压的比较。(D) 传感器与流场平行时的计算流体动力学 (CFD) 模拟。(E) 传感器垂直于流场时的 CFD 模拟。(F-H) AFLN 对不同弱机械刺激的反应。用橡胶头滴管在附近注入水(F),用吹风机吹水面(G),将小螺丝从不同高度扔入水中(H)。
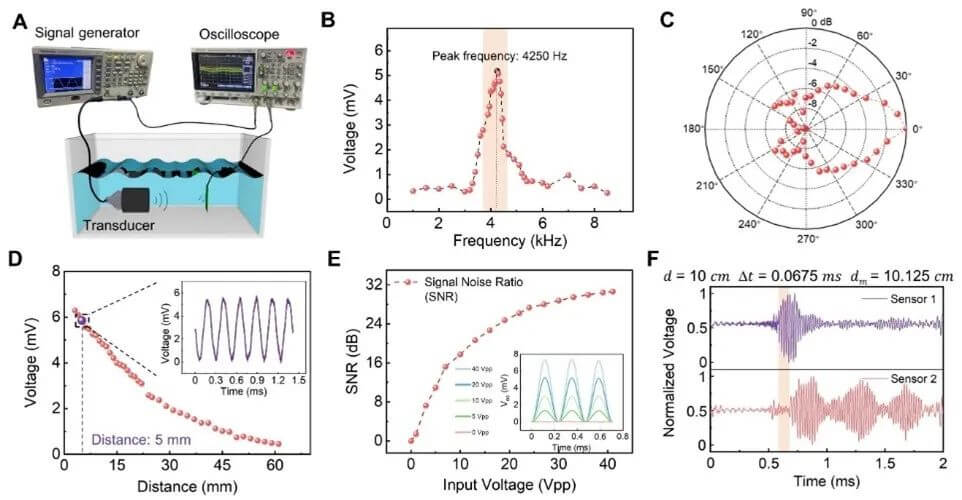 图 4. AFLN 的声学特性。(A)高频测试实验装置示意图。(B) 不同声频下 AFLN 的输出电压。谐振频率约为4250 Hz。(C) 不同方向模式。(D) 不同声源距离处 AFLN 的输出电压。(E) 不同输入能量下 AFLN 的信噪比和输出波形。(F) 使用 AFLN 对声波响应的时间差进行测距。
图 4. AFLN 的声学特性。(A)高频测试实验装置示意图。(B) 不同声频下 AFLN 的输出电压。谐振频率约为4250 Hz。(C) 不同方向模式。(D) 不同声源距离处 AFLN 的输出电压。(E) 不同输入能量下 AFLN 的信噪比和输出波形。(F) 使用 AFLN 对声波响应的时间差进行测距。
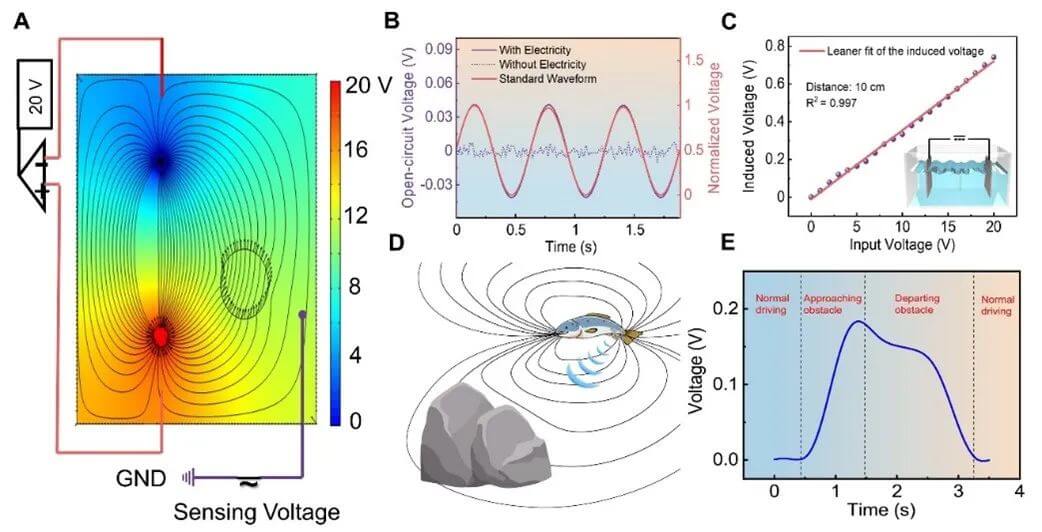 图5. AFLN对水下电场的特性。(A)电传感器原理示意图。(B) 电传感器在平行板电场作用下可以获得与标准水波(红色)相同的幅值相位信息(蓝色)。当去除电场并施加标准波时,电传感器没有相应的响应(蓝色虚线)。(C) AFLN 对基于平行板的水下电场输入电压的响应。(D) AFLN 通过电场检测静止障碍物。(E) 避障期间的 AFLN 输出。
图5. AFLN对水下电场的特性。(A)电传感器原理示意图。(B) 电传感器在平行板电场作用下可以获得与标准水波(红色)相同的幅值相位信息(蓝色)。当去除电场并施加标准波时,电传感器没有相应的响应(蓝色虚线)。(C) AFLN 对基于平行板的水下电场输入电压的响应。(D) AFLN 通过电场检测静止障碍物。(E) 避障期间的 AFLN 输出。
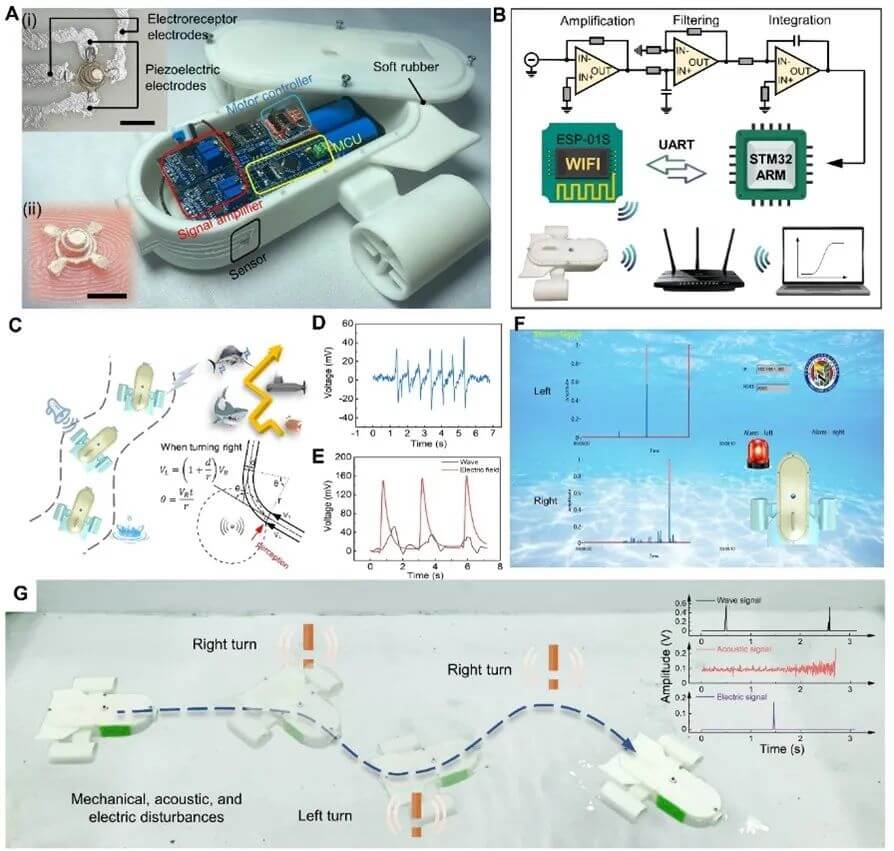 图 6. AFLN 系统在机器人避障中的应用演示。(A) 配备 AFLN 系统的 AUV 照片。(B)系统工作原理。控制系统由信号采集、处理、放大、传输等模块组成,可实现AFLN传感器对水下机器人的自动控制。(C) AUV系统导航策略和轨迹。插图为碰撞角度和左右差速获取方法示意图。(D) 感知动态波环境中的机械刺激。(E) 同时应用波和电场刺激。(F)自主避障电压显示程序。实时信号由红线表示,而电压电位由蓝线表示。(G) AUV 避障应用示意图。插图展示了从系统获取的实时信号。
图 6. AFLN 系统在机器人避障中的应用演示。(A) 配备 AFLN 系统的 AUV 照片。(B)系统工作原理。控制系统由信号采集、处理、放大、传输等模块组成,可实现AFLN传感器对水下机器人的自动控制。(C) AUV系统导航策略和轨迹。插图为碰撞角度和左右差速获取方法示意图。(D) 感知动态波环境中的机械刺激。(E) 同时应用波和电场刺激。(F)自主避障电压显示程序。实时信号由红线表示,而电压电位由蓝线表示。(G) AUV 避障应用示意图。插图展示了从系统获取的实时信号。
总结
- 本文制造了一种AFLN 传感系统。它的尺寸小于6毫米,能够感知微小的水流、声压和电场,以如此紧凑的形式展示了其多模态传感能力。当多个信号共存时,低幅度、高频的声音信号叠加在高幅度、低频的波信号上,因此,我们可以通过傅里叶变换来区分这两个信号。同时,电信号被各种电极捕获。因此,这三个信号可以单独分析。利用AFLN系统的多种感知能力,自主水下航行器(AUV)可以有效避开障碍物或逃避外部刺激。此外,我们提出的后加固方法提供了一种简便可行的方法来增强三维结构的耐久性,从而促进多模态传感器的响应。我们预计这些紧凑型多功能传感器有潜力显着推进智能机器人的发展,以满足未来水下应用的巨大需求。
转载链接:
【Nano research】高适应且宽频输出的共振硅胶柔性带式振动能摩擦纳米发电机
背景介绍
- 近年来,随着物联网技术的发展,整个人类社会都发生了显著的变化,现代生产生活中的智能船舶、智能机械、智能制造、智能监测和智慧海洋等都与物联网技术息息相关。而物联网的信息来源主要是通过数以亿计的大量感知节点组成的感知层实现的。这些大量分布式感知节点的供能已经成为物联网的重要挑战之一,而大量机械设备在工作的过程中会产生很多未被有效利用的包括振动能在内的弃能,通过捕获未有效利用的机械振动能量来实现无线传感器网络的原位供电具有广阔的前景。
成果简介
- 近日,大连海事大学徐敏义教授团队针对普遍存在的定频工作机械设备的特点,提出了一款由硅胶柔性带作为柔性谐振器和独立层的共振摩擦纳米发电机(HSR-TENG),利用柔性谐振器的独特设计实现了软接触和宽频输出。本文开展了柔性带在强迫振动激励下振动特性及HSR-TENG发电特性的相关研究工作。本文研究了影响柔性带一阶振型频率的显著性影响因素,提出了高适应不同共振频率的HSR-TENG的调整原则。通过振动激励和结构参数对HSR-TENG输出特性的影响研究,确定了其优化结构。研究表明HSR-TENG同时实现了共振频率下的高输出及宽频输出,峰值功率密度达到153.9 W/m³,能够点亮12盏0.5W的LED灯。本文将HSR-TENG安装于实际船用空压机,通过捕获实际机械设备的振动能实现了对温度传感器的连续原位供能。本文的研究成果提供了一种具有应用前景的定频振动能量捕获方法,通过捕获定频机械振动能量为温度传感器的持续供能,对物联网时代无线传感节点的原位供能具有重要意义。
图文导读
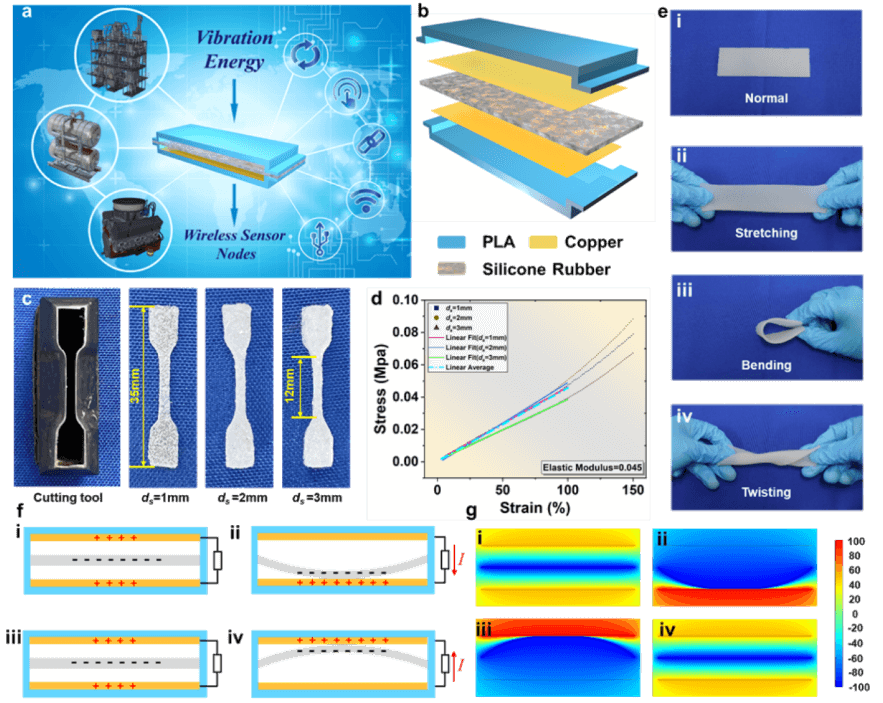 图1 HSR-TENG的应用场景、结构、变形特性及工作原理。(a)HSR-TENG的应用场景;(b) HSR-TENG的结构;(c)标准刀具及不同厚度硅胶柔性带试样;(d)硅胶柔性带的弹性模量;(e) 柔性带在(i)正常、(ii)拉伸、(iii)弯曲和(iv)扭曲状态下的照片;(f)HSR-TENG的工作原理;(g) HSR-TENG的模拟电势分布。
图1 HSR-TENG的应用场景、结构、变形特性及工作原理。(a)HSR-TENG的应用场景;(b) HSR-TENG的结构;(c)标准刀具及不同厚度硅胶柔性带试样;(d)硅胶柔性带的弹性模量;(e) 柔性带在(i)正常、(ii)拉伸、(iii)弯曲和(iv)扭曲状态下的照片;(f)HSR-TENG的工作原理;(g) HSR-TENG的模拟电势分布。
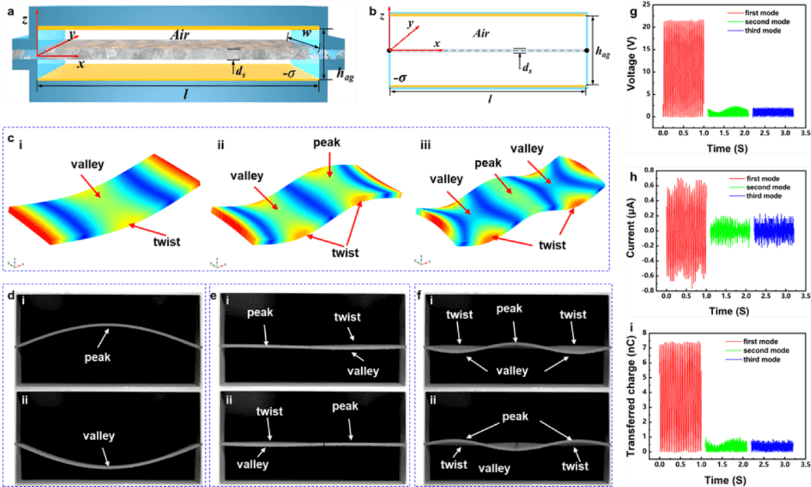 图2硅胶柔性带的运动特性。用于分析柔性带运动特性的(a)三维和(b)二维坐标系;(c)柔性带在(i)一阶、(ii)二阶、(iii)三阶振动模式的仿真结果;高速摄像机捕捉到硅橡胶条在(d)一阶、(e)二阶、(f)三阶振动模式下的运动响应;不同振动模式下(g)开路电压,(h)短路电流,(i)转移电荷。
图2硅胶柔性带的运动特性。用于分析柔性带运动特性的(a)三维和(b)二维坐标系;(c)柔性带在(i)一阶、(ii)二阶、(iii)三阶振动模式的仿真结果;高速摄像机捕捉到硅橡胶条在(d)一阶、(e)二阶、(f)三阶振动模式下的运动响应;不同振动模式下(g)开路电压,(h)短路电流,(i)转移电荷。
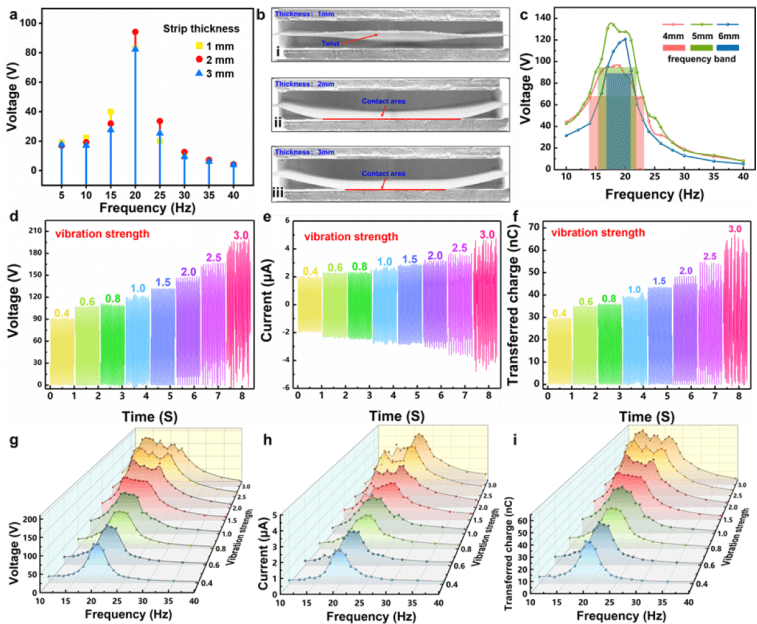 图3 HSR-TENG在柔性带非线性变形下的输出性能。(a)柔性带长度为10 cm,厚度为1-3 mm的HSR-TENG的开路电压;(b)柔性带厚度为(i)1mm,(ii)2mm,(iii)3mm的柔性带的运动响应;(c)不同电极间距的HSR-TENG的开路电压和电压带宽;一阶振型振动频率下不同振动强度作用下的(d)开路电压、(e)短路电流和(f)转移电荷量;不同振动强度下HSR-TENG的(g)开路电压,(h)短路电流和(i)转移电荷量。
图3 HSR-TENG在柔性带非线性变形下的输出性能。(a)柔性带长度为10 cm,厚度为1-3 mm的HSR-TENG的开路电压;(b)柔性带厚度为(i)1mm,(ii)2mm,(iii)3mm的柔性带的运动响应;(c)不同电极间距的HSR-TENG的开路电压和电压带宽;一阶振型振动频率下不同振动强度作用下的(d)开路电压、(e)短路电流和(f)转移电荷量;不同振动强度下HSR-TENG的(g)开路电压,(h)短路电流和(i)转移电荷量。
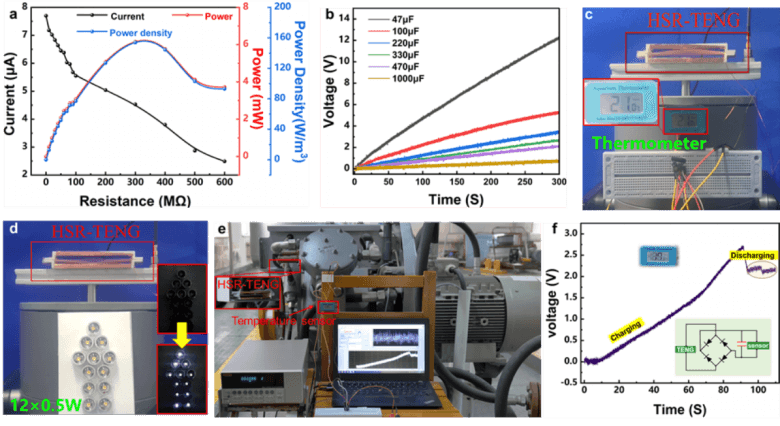 图片图4 HSR-TENG的振动能量捕获演示。(a)HSR-TENG的输出电流、计算功率和功率密度随匹配电阻的变化;(b) 300s时间内HSR-TENG对不同电容的充电电压曲线;(c)HSR-TENG为商用温度传感器供电演示;(d)HSR-TENG为12盏0.5W的LED灯供电演示;(e)安装在实际空压机上的HSR-TENG为温度传感器持续供电;(f)温度传感器连续供电时电容充放电曲线。
图片图4 HSR-TENG的振动能量捕获演示。(a)HSR-TENG的输出电流、计算功率和功率密度随匹配电阻的变化;(b) 300s时间内HSR-TENG对不同电容的充电电压曲线;(c)HSR-TENG为商用温度传感器供电演示;(d)HSR-TENG为12盏0.5W的LED灯供电演示;(e)安装在实际空压机上的HSR-TENG为温度传感器持续供电;(f)温度传感器连续供电时电容充放电曲线。
作者简介
- 徐敏义教授课题组近年来主要从事基于船舶与海洋工程领域能量捕获及自驱动传感,水下能量捕获与信息感知,水下智能机器人等方面的研究工作。徐敏义教授2012年毕业于北京大学,2016-2017年赴美国佐治亚理工学院访学(导师:王中林院士),2021年创建了大连市海洋微纳能源与自驱动系统重点实验室,主持了包括国家重点研发计划专项课题、国家自然科学基金在内的国家级及省部级项目等10余项,入选中国科协青年人才托举工程、交通运输部青年科技英才、辽宁省“兴辽英才计划”青年拔尖人才等人才工程,获省部级及以上奖励4项。近五年来,在Nature Communications、Research、Advanced Energy Materials、Nano Energy、ACS Nano、Applied Energy等中科院大类1区Top期刊发表论文48篇,其中影响因子大于10的论文41篇,ESI高被引论文2篇。
文章信息
- Du T, Shen D, Xi Z, et al. Highly adaptive and broadband triboelectric energy harvester with stretching silicone rubber strip for variable harmonic frequency vibration. Nano Research, 2023, https://doi.org/10.1007/s12274-023-6309-3.
转载链接:
【Small】基于深度学习的纤维状摩擦电式自驱动振动传感器
研究背景
- 振动传感器在实现工业4.0过程中的设备监测和预测性维护扮演至关重要的角色。然而,目前依赖线缆供电的商用振动传感技术在监测精准性和布置灵活性仍有待提高。摩擦纳米发电机可有效地收集环境中的机械振动能,在采集振动能过程中无需外界供能,为降低感知系统的能耗、实现自驱动振动感知提供了一种新途径。现有的基于摩擦纳米发电机的振动传感器多采用刚性硬质结构,难以适配具有复杂表面的设备,极大增加了布置的难度和复杂性。此外,刚性结构在长期振动激励下容易发生疲劳损坏,这对于在恶劣环境中运行的机械设备长期振动监测提出了挑战。
文章概述
近日,大连海事大学徐敏义教授团队针对以上问题,设计了一种基于芯鞘结构的柔性纤维状摩擦纳米发电机(Fiber-shaped Triboelectric Nanogenerator, F-TENG),旨在实现对于设备振动的自驱动感知。F-TENG因其良好的柔韧性及适应性,可满足曲面结构的振动感知需求。在本项研究中,首先通过力学模型及仿真分析,对F-TENG的形变特性进行分析,得出了影响TENG发电性能的关键参数。在此基础上,通过实验方法,对影响F-TENG振动感知特性的关键参数进行了优化。实验结果表明经过优化后的F-TENG可有效感知0.1至100 Hz的宽频振动,且即使经过约45000次连续振动激励后其输出电信号幅值和频率仍可保持稳定。在应用于实际生产中的柴油机振动监测时,其振动频率感知误差相较于商用振动传感器仅为0.32%。最后,结合深度学习方法成功地实现了对不同管道系统运行状态的识别,识别准确率可达97.87%。
该成果以“Coaxial Flexible Fiber-shaped Triboelectric Nanogenerator Assisted by Deep Learning for Self-Powered Vibration Monitoring”为题发表在国际知名期刊《Small》上。大连海事大学博士研究生赵聪、杜太利副教授、硕士毕业生葛彬为该论文的共同第一作者,大连海事大学徐敏义教授与杜太利副教授为论文通讯作者。
图文导读
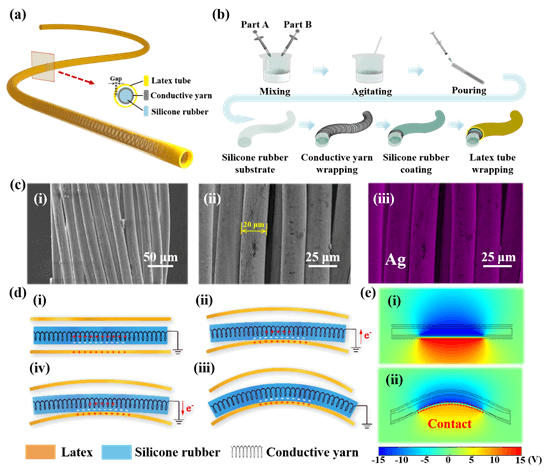 图1. F-TENG的结构设计与感知机理
图1. F-TENG的结构设计与感知机理
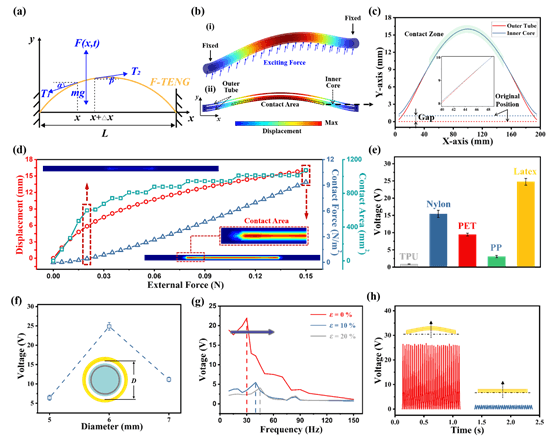 图2. F-TENG的力学特性分析与性能优化
图2. F-TENG的力学特性分析与性能优化
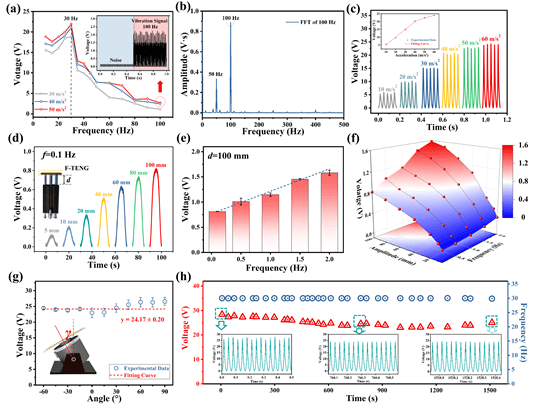 图3. F-TENG的振动感知特性
图3. F-TENG的振动感知特性
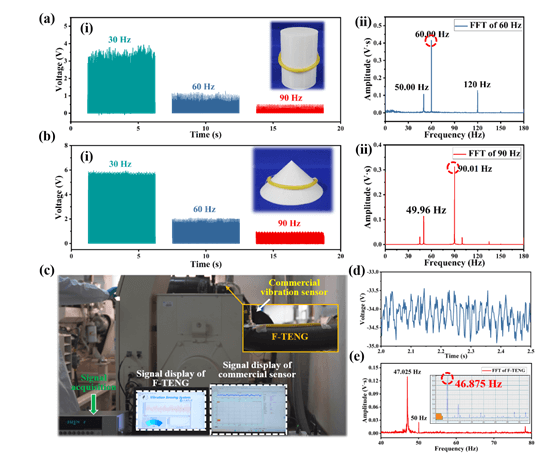 图4. F-TENG对复杂结构的适应性测试及对实际船用柴油机振动感知
图4. F-TENG对复杂结构的适应性测试及对实际船用柴油机振动感知
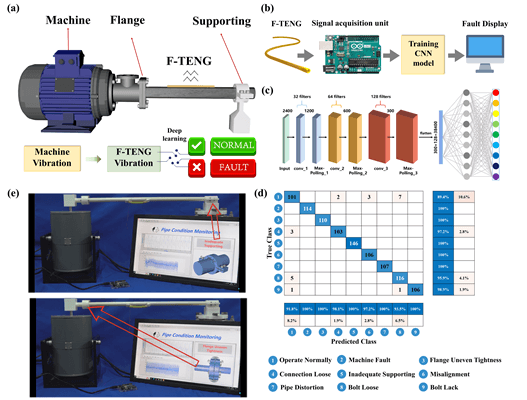 图5. 融合深度学习的管路系统状态监测
图5. 融合深度学习的管路系统状态监测
总结
- 综上所述,这项研究提出了一种柔性、高适应性纤维状摩擦纳米发电机,用于自驱动振动感知。结合力学模型及仿真分析,对传感器的感知机理进行了分析。实验结果表明经过优化后的F-TENG可感知0.1至100 Hz范围内机械振动,同时可实现对于曲面结构振动感知需求。当应用于实际柴油机时,其相较于商用振动传感器,振动频率感知误差仅为0.32%。最后,结合深度学习方法成功实现了对不同管道系统运行状态的识别,识别准确率可达97.87%。总之,新设计的F-TENG具有适应性强、经济简便等优势,为实现未来自驱动振动感知提供了一种新的解决方案。
转载链接:
深化校企合作共谋未来发展|我校轮机工程学院师生赴大连中远海运重工交流学习
- 11月25日,按照《船海微纳能源实践》及《机器人概论与实践》的课程安排,并根据我校与大连中远海运重工有限公司共建辽宁省现代海运产业研究院的框架内容,轮机工程学院邹永久老师带领相关本科生及研究生赴大连中远海运重工有限公司开展交流学习活动。

- 双方在大连中远海运重工有限公司举行了座谈会。大连中远海运重工有限公司的沈安阳部长、徐新主任、孙锋经理,以及我院2020级毕业生王赫等出席座谈会,并与师生进行了深入交流。与会者就企业的发展历程、整体概况、企业文化、未来发展趋势、员工待遇及用人要求、人才培养计划、校企联合培养项目等展开深入讨论。王赫分享了自己入职三年来的工作心得,并对学弟学妹们的学业规划提出了宝贵的建议。在座谈会上,同学们提出了自己学习和职业生涯规划中遇到的困惑,都一一获得了专业的解答。会议最后,沈安阳对于同学们关于智能船舶的未来发展和应用给予了详细的阐述,他鼓励同学们要敢于创新,勇于实践,努力学习扎实的专业知识,为海运事业的科技进步做出贡献。
- 当日,同学们还深入厂区进行了实地参观学习。在技术经理孙锋的专业讲解下,同学们不仅了解到了先进的生产技术,还参观了我校正在建设中的智能研究与实训两用船。该船配置智能航行、智能运维、智能能效管理等平台和智能教学设备,建成后可以在有人和无人条件下实现自主航行,依托该船将进行智能航行技术与系统、船舶远程监控与岸基支持、船舶智能通信技术等方面的研究,推进我国智能船舶技术发展。参观学习中,同学们积极提问,热切讨论,对船舶的智能化未来充满了期待。

- 此次交流学习活动不仅加深了同学们对船厂工作流程和最新技术的了解,也为学校与企业未来的深度合作奠定了基础。我校将继续深化与大连中远海运重工有限公司的合作,为培养更多高素质、适应现代海运产业需求的人才而共同努力。
转载链接:
第六届水下无人系统技术高峰论坛 暨2023年兵器科学与技术高峰论坛成功举办

- 2023年12月3日,“第六届水下无人系统技术高峰论坛暨2023年兵器科学与技术高峰论坛”在昆明成功举办。论坛由中国造船工程学会、西北工业大学、中国船舶集团第七〇五研究所主办,“翱翔”重点实验室、水下信息与控制全国重点实验室、水下自主无人系统工信部重点实验室、中国船舶集团有限公司第七〇五研究所科技委协办,《水下无人系统学报》和《热加工工艺》学术媒体支持。

- 本次将水下无人系统技术高峰论坛和兵器科学与技术高峰论坛两个论坛合并举办,以“水下无人装备及无人装备反制”为主题,以加强学科建设与技术发展融合为目标,推动水下无人系统产学研融通发展。中国工程院院士邱志明,中国工程院院士、西北工业大学校长宋保维,中国造船工程学会秘书长王俊利,中国船舶第七〇五研究所所长、中船华雷董事长王中,中国船舶昆船公司党委书记、董事长张云峰,中国船舶七五〇试验场场长崔国平,云南省委军民融合办副主任汤礼东等嘉宾出席论坛。论坛还邀请到国防科技大学、上海交通大学、航天科工、中国电科、中国船舶等百余所高校、科研院所和企事业单位代表,共计300余人汇聚一堂。
领导致辞
 西北工业大学航海学院潘光院长主持会议
西北工业大学航海学院潘光院长主持会议
- 论坛开幕式由西北工业大学航海学院潘光院长主持。西北工业大学校长宋保维院士、中国造船工程学会王俊利秘书长、中国船舶第七〇五研究所王中所长致辞。
 西北工业大学校长宋保维院士致辞
西北工业大学校长宋保维院士致辞
- 宋保维校长表示,当今世界正经历百年未有之大变局,习近平总书记在今年中央政治局第三次集体学习时强调,新一轮科技革命和产业变革突飞猛进,学科交叉融合不断发展,科学研究范式发生深刻变革。西北工业大学牢记习近平总书记“紧贴强国强军需要”、“打造国之重器、培养杰出人才”的特殊关怀和嘱托,扎根西部、献身国防。
 中国造船工程学会王俊利秘书长致辞
中国造船工程学会王俊利秘书长致辞
- 王俊利秘书长在致辞中提到,论坛的举办旨在进一步推动我国水下无人系统技术的发展,逐步促进新技术、新产品的开发和应用,加强水下无人系统及其相关行业的融通交流。希望通过此次活动,借助专家力量,为水下无人系统领域的发展带来新机遇。
 中国船舶第七〇五研究所王中所长致辞
中国船舶第七〇五研究所王中所长致辞
- 王中所长指出,水下无人对抗和无人反制已逐步成为海上争夺的主要方式,我们在发展水下无人装备的同时,应抓紧研究新的技术和战术方法以对抗反制敌水下无人装备,才能在未来水下作中获取主动权。此次论坛主题“水下无人装备及无人装备反制”旨在促进水下无人航行器技术创新与作战运用的深度融合,加速无人装备科技向战斗力转化,加快我国无人装备作战力量发展。
大会主题报告
 中国工程院院士邱志明作大会主题报告
中国工程院院士邱志明作大会主题报告
- 中国工程院院士邱志明、上海大学教授彭艳、西北工业大学教授潘光、华中科技大学教授杨荣贵、中科院沈阳自动化研究所研究员俞建成、国防科技大学教授郁殿龙、哈尔滨工程大学教授商志刚、中国船舶第七〇五所研究员范辉分别围绕跨域无人技术、海洋无人艇关键技术、深海飞翼滑翔机关键技术、高功率电子的热输运与热管理技术、“海鲸”轻型长航程AUV技术、声学超材料声振传播调控与声隐身创新设计、空海跨域通信探索性研究和水下反UUV装备概念探索与启示等研究方向作大会主题报告,与参会代表共同探讨水下无人装备及无人装备反制领域技术发展趋势及应用前景。大会专题报告由中国船舶第七〇五研究所科技委主任史小锋主持。
 主题报告精彩瞬间
主题报告精彩瞬间
论坛学术交流
- 论坛学术交流环节,由《水下无人系统学报》执行主编蔡卫军研究员主持。本届论坛电子论文集收录文章81篇,邀请了大连海事大学、西安工业大学、中国船舶第七一一研究所、中电科发展规划研究院、中国船舶第七〇五研究所等单位的6位优秀论文作者代表就各自团队在水下无人系统相关领域里取得的最新研究进展进行学术交流。
学术交流集锦
- 至2023年,水下无人系统技术高峰论坛已经连续成功举办了六届。未来,论坛将持续聚焦行业前沿与学科热点,进一步加强学科建设与技术发展融合,推动水下无人系统行业融通发展和兵器科学与技术学科发展进步,为国家国防科技创新和社会经济建设做出更大的贡献!
转载链接:
【Nano Energy】大连海事大学徐敏义&杜太利研究团队—基于信号分解和自动机器学习的摩擦电内嵌式智能轴承滚珠缺陷诊断
研究背景
轴承作为工业和日常生活应用中的重要部件,对旋转机械的长期可靠运行起着至关重要的作用。一旦轴承出现故障,除了影响机械的性能和寿命外,还会造成经济损失甚至人员伤亡。轴承的故障可能是由疲劳、润滑不足、污染等引起的。随着物联网和大数据处理技术的发展和广泛应用,出现了一些智能轴承原型。然而,这些轴承需要额外的传感器和系统并依赖于外部供电,这大大增加了结构的复杂性,限制了它们的大规模应用。
摩擦纳米发电机(TENG)基于接触通电和静电感应原理,能有效地将机械能转化为电能,自提出十多年来已经取得了明显的技术进步。由于其对机械激励的高灵敏度,摩擦电传感器已成为实际应用中最受欢迎和最有前途的研究方向。基于TENG的轴承传感器虽已应用于各种状态监测,但对轴承滚动体的探索较少。滚动体作为一种易损部件,其缺陷的准确诊断对于轴承寿命预测和健康监测具有重要意义。然而,摩擦电滚动轴承在滚珠部分缺陷时的输出信号非常相似,这对轴承滚珠的状态监测和故障诊断提出了挑战。因此,如何获取缺陷信息并区分相似信号是亟需解决的问题。
文章概述
近日,大连海事大学徐敏义教授团队尝试直接在商用滚动轴承中安装摩擦电组件(T-bearing)来感知滚珠的缺陷,并将其应用于轴承的故障诊断。在该设计中,覆盖有聚四氟乙烯介电膜的柔性插指铜电极作为摩擦电感知层贴附着在轴承外圈内表面。当轴承旋转时,聚四氟乙烯膜与滚动钢球摩擦产生电信号,然后通过插指电极进行信号输出。钢球与感应层的直接接触更有利于两个配对摩擦副的接触电气化,从而产生稳定的电信号,并使传感信息更加完整,进而提高T-bearing对钢球状态变化的灵敏度。在此基础上,首次引入信号分解算法来提取相似时域电信号的特征。然后借助自动机器学习模型训练这些包含故障信息的特征分量,对各种轴承滚珠缺陷进行分类和识别。结合两种算法,成功地检测和识别了轴承滚珠的5种工况,包括正常、一球缺陷、两球相对位置缺陷、两球相邻位置缺陷和介电膜破损。结果表明,通过信号分解算法提取故障特征后的滚珠缺陷识别准确率达到99.48%以上,大大高于原始相似信号的准确率78.34%。该研究验证了摩擦电技术用于轴承滚动体缺陷检测的可行性,以及AI算法在提高摩擦电传感器精度方面的潜力,其在智能轴承领域显示出良好的应用前景。
该成果以“Triboelectric Nanogenerator-embedded Intelligent Bearing with Rolling Ball Defect Diagnosis via Signal Decomposition and Automated Machine Learning”为题发表在国际知名期刊《Nano Energy》上。大连海事大学博士研究生董方阳、硕士研究生杨恒一为论文的共同第一作者,大连海事大学徐敏义教授与杜太利副教授为论文通讯作者。大连海事大学硕士研究生杜恒旭、朱梅贤、席子岳与王玉莲参与了论文的相关研究工作。
图文导读
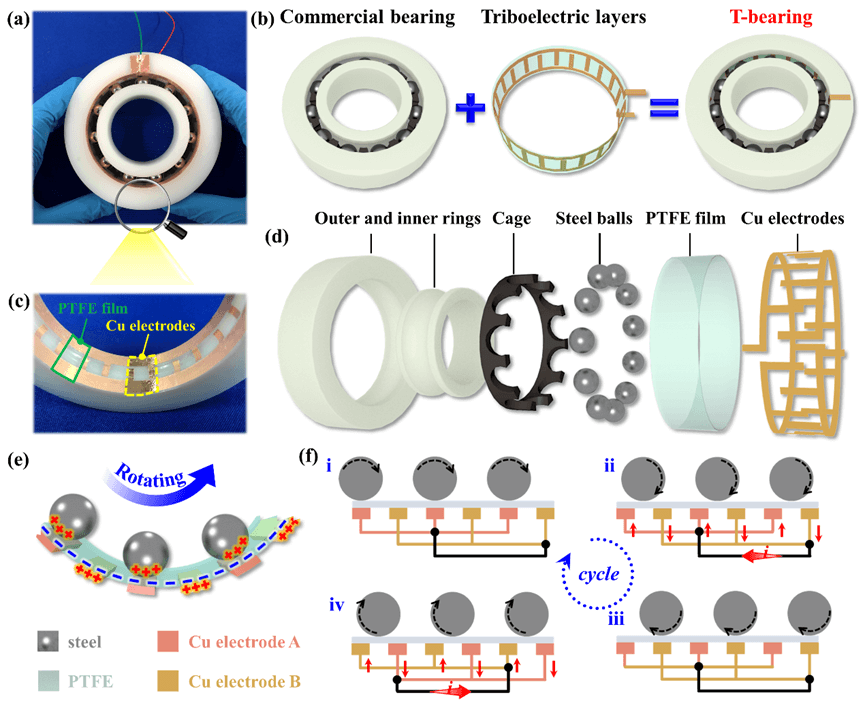 图1:T-bearing的结构及工作原理。(a)T-bearing的实际照片和(b)组成示意图。(c)感知层的特写照片。(d)T-bearing的装配图。(e)TENG组成和(f)工作原理。
图1:T-bearing的结构及工作原理。(a)T-bearing的实际照片和(b)组成示意图。(c)感知层的特写照片。(d)T-bearing的装配图。(e)TENG组成和(f)工作原理。
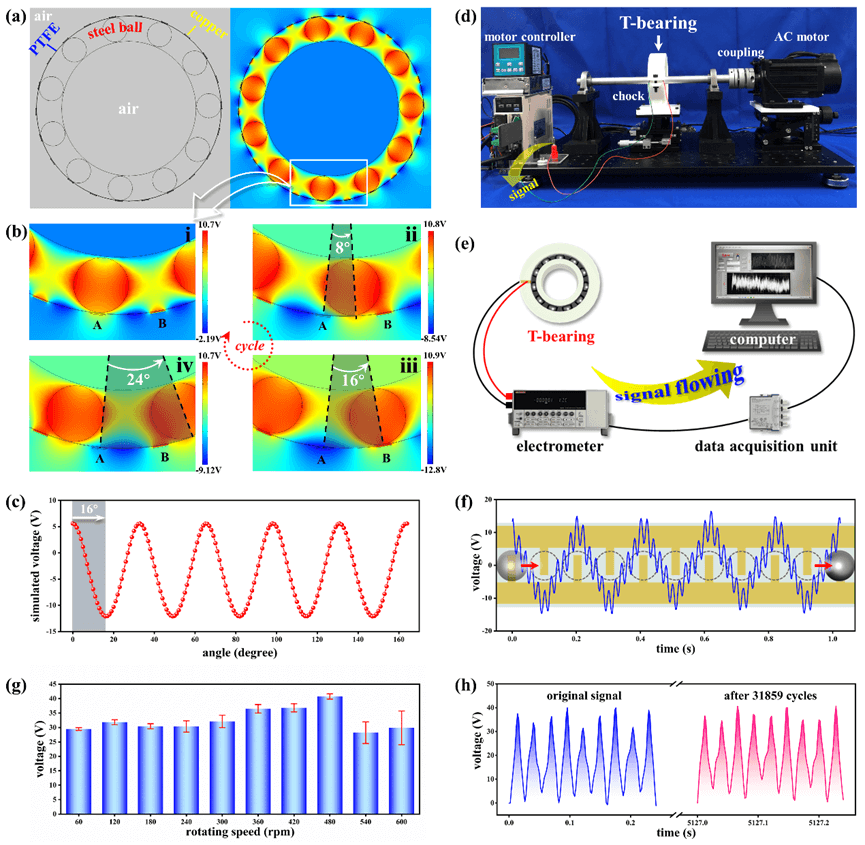 图2:T-bearing的仿真模型与实验过程。(a)COMSOL仿真的初始设置和(b)电极之间的周期性电位变化。(c)旋转一圈过程中的模拟电压。(d)测试平台的照片。(e)数据获取的流程。(f)电机转速为60rpm时T-bearing的VOC。(g)不同转速下的VOC。(h)T-bearing在31859个周期后的电压信号和初始电压信号的比较。
图2:T-bearing的仿真模型与实验过程。(a)COMSOL仿真的初始设置和(b)电极之间的周期性电位变化。(c)旋转一圈过程中的模拟电压。(d)测试平台的照片。(e)数据获取的流程。(f)电机转速为60rpm时T-bearing的VOC。(g)不同转速下的VOC。(h)T-bearing在31859个周期后的电压信号和初始电压信号的比较。
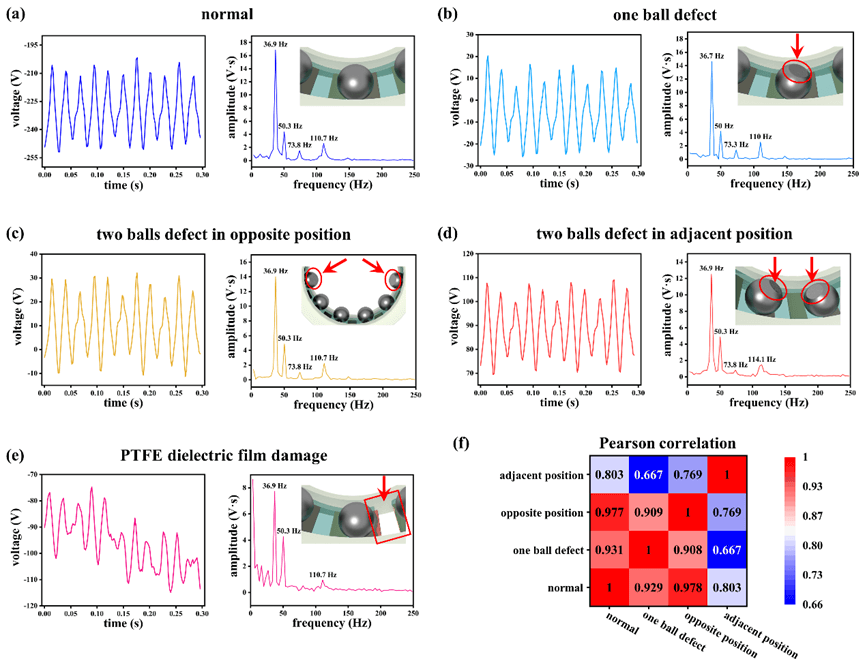 图3:不同故障下T-bearing电压信号的时频域比较:(a)正常,(b)一球缺陷,(c)两球相对位置缺陷,(d)两球相邻位置缺陷,(e)PTFE介电膜破损。(f)相似信号的相关性热图。
图3:不同故障下T-bearing电压信号的时频域比较:(a)正常,(b)一球缺陷,(c)两球相对位置缺陷,(d)两球相邻位置缺陷,(e)PTFE介电膜破损。(f)相似信号的相关性热图。
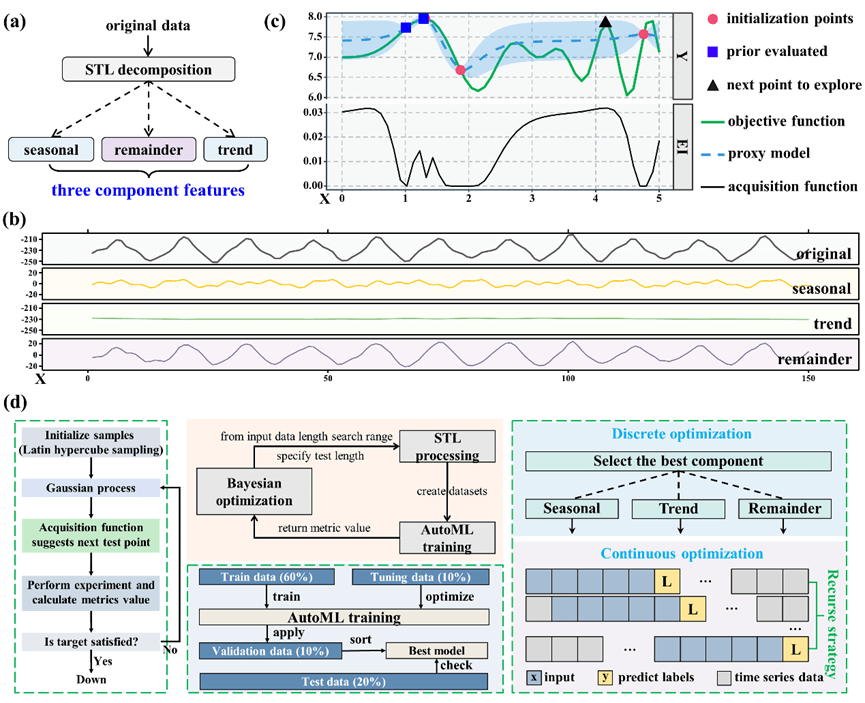 图4:摩擦电信号的分析与预测。(a)STL分解过程示意图。(b)STL分解T-bearing电压信号的三个特征分量。(c)BO过程的可视化。(d)AutoML和BO组成的直接递归预测框架。
图4:摩擦电信号的分析与预测。(a)STL分解过程示意图。(b)STL分解T-bearing电压信号的三个特征分量。(c)BO过程的可视化。(d)AutoML和BO组成的直接递归预测框架。
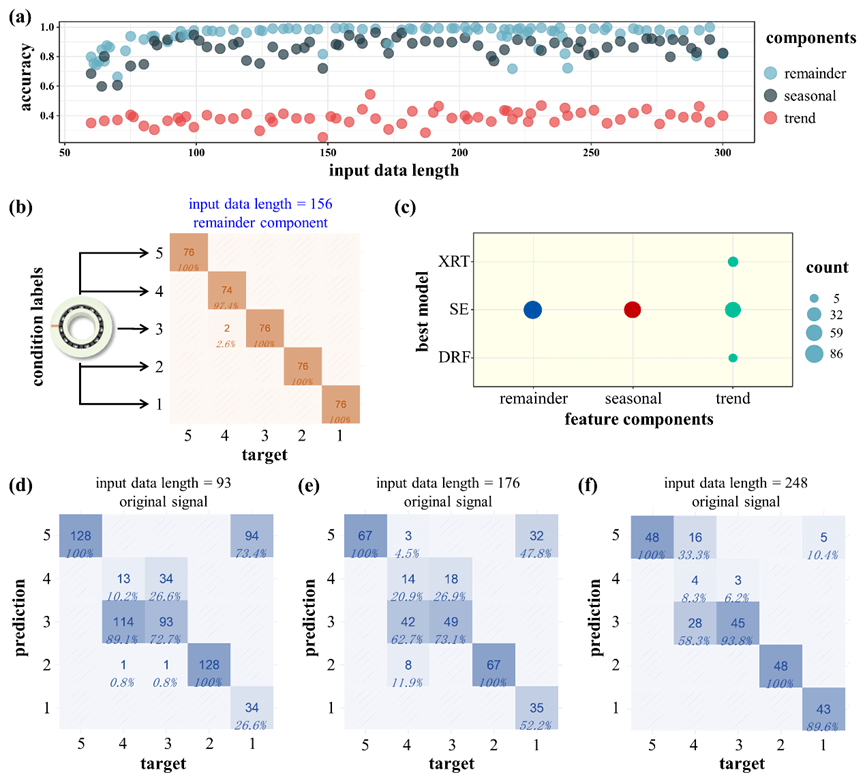 图5:AutoML模型的预测结果。(a)不同输入数据长度下各特征分量的模型精度。(b)最终优化参数下SE模型的预测精度。(c)来自AutoML的最佳模型类型分布图。(d)、(e)、(f)不同输入数据长度对原始电压信号的预测精度。
图5:AutoML模型的预测结果。(a)不同输入数据长度下各特征分量的模型精度。(b)最终优化参数下SE模型的预测精度。(c)来自AutoML的最佳模型类型分布图。(d)、(e)、(f)不同输入数据长度对原始电压信号的预测精度。
总结
- 综上所述,该研究提出了一种摩擦电传感器内嵌式滚动轴承(T-bearing)用于滚珠缺陷的检测和识别。在轴承外圈内表面贴附由聚四氟乙烯介电膜和插指铜电极组成的摩擦电感知层,使T-bearing具有稳定的输出性能和最直接的输出信号。对不同转速下的输出特性以及正常和故障状态下的传感信号进行了系统的测量和分析。针对滚动钢球的缺陷诊断,提出了一种新的摩擦电信号分析与预测范式,实现了最优输入长度和数据特征的动态选择。首次将STL分解、AutoML模型和BO算法结合起来,对T-bearing试验过程中产生的摩擦电信号进行分析。引入STL提取由轴承滚珠缺陷引起的相似时域电压信号的特征。再利用AutoML模型对包含故障信息的特征分量进行训练,完成对正常工况和不同故障的分类和识别。将BO算法应用于参数动态优化后,最佳模型对5种不同工况的识别准确率为99.48%,大大优于不进行信号分解的最高准确率78.34%。因此,该研究推进了轴承的智能化,提高了易受环境影响的摩擦电信号的故障诊断精度。
转载链接:
- Sponsors
- Privacy
- Join us
- Contact
- © 2021 MSPSLab [CC BY-NC-ND 4.0]
- Page Views: times
-
